Features
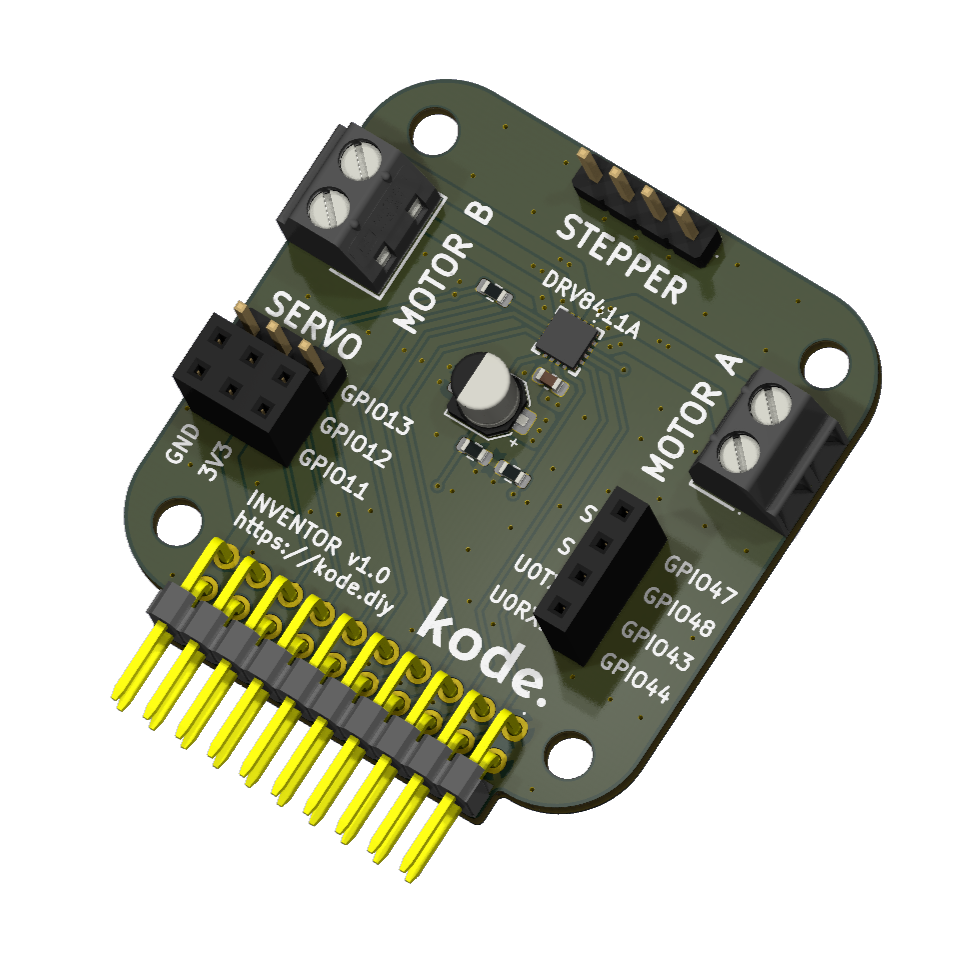
With this module you can connect motors to your Kode Dot and make robots like a car following lines. You can connect the following:- 2x DC motors or 1x stepper motor
- 1x servo motor
- 4x GPIOs for sensors
- 1x I2C bus
Connection scheme
The driver that controls the motors is connected as follows:| Driver | ESP32-S3 |
|---|---|
| AIN1 | GPIO42 |
| AIN2 | GPIO41 |
| BIN1 | GPIO40 |
| BIN2 | GPIO39 |
| nFAULT | GPIO38 |
| AIPROPI | GPIO37 |
| BIPROPI | GPIO36 |
AIPROPI and BIPROPI are used to measure the current that each motor is consuming. For more information, consult the driver’s datasheet.
Example code
Connect two DC motors to the connectors and with this code you will see how they first accelerate, then maintain the maximum speed and finally decelerate.motors_test.ino
/**
* DRV8411A + 2x DC + Servo + Current reading via IPROPI (ESP32-S3).
* Prints to Serial Plotter: IA(A) \t IB(A) \t ITRIP(A) while sequencing both motors and a servo.
* IPROPI math (datasheet): IPROPI(µA) = I_LS_total(A) * 200 µA/A; V_IPROPI = IPROPI * R_IPROPI;
* I_motor = V_IPROPI / (R_IPROPI * 200e-6); I_TRIP = VREF / (R_IPROPI * 200e-6).
*/
/* ───────── KODE | docs.kode.diy ───────── */
#include <Arduino.h>
#include <ESP32Servo.h>
/* DRV8411A pins */
constexpr int PIN_AIN1 = 42;
constexpr int PIN_AIN2 = 41;
constexpr int PIN_BIN1 = 39;
constexpr int PIN_BIN2 = 40;
constexpr int PIN_nFAULT = 3;
/* IPROPI -> ADC (A channel and B channel) */
constexpr int PIN_AIPROPI = 2; /* ADC input for A-IPROPI */
constexpr int PIN_BIPROPI = 1; /* ADC input for B-IPROPI */
/* Servo */
constexpr int PIN_SERVO = 13;
Servo servo;
/* Servo settings (microseconds and angles) */
constexpr int SERVO_MIN_US = 500;
constexpr int SERVO_MAX_US = 2500;
constexpr int SERVO_CENTER = 90;
constexpr int SERVO_LEFT = 0;
constexpr int SERVO_RIGHT = 180;
/* DRV8411A helpers */
inline void motorA_coast() { digitalWrite(PIN_AIN1, LOW); digitalWrite(PIN_AIN2, LOW); } /* Hi-Z both inputs */
inline void motorA_brake() { digitalWrite(PIN_AIN1, HIGH); digitalWrite(PIN_AIN2, HIGH); } /* Fast decay brake */
inline void motorA_fwd() { digitalWrite(PIN_AIN1, HIGH); digitalWrite(PIN_AIN2, LOW); } /* A forward */
inline void motorA_rev() { digitalWrite(PIN_AIN1, LOW); digitalWrite(PIN_AIN2, HIGH); } /* A reverse */
inline void motorB_coast() { digitalWrite(PIN_BIN1, LOW); digitalWrite(PIN_BIN2, LOW); } /* Hi-Z both inputs */
inline void motorB_brake() { digitalWrite(PIN_BIN1, HIGH); digitalWrite(PIN_BIN2, HIGH); } /* Fast decay brake */
inline void motorB_fwd() { digitalWrite(PIN_BIN1, HIGH); digitalWrite(PIN_BIN2, LOW); } /* B forward */
inline void motorB_rev() { digitalWrite(PIN_BIN1, LOW); digitalWrite(PIN_BIN2, HIGH); } /* B reverse */
/* Timings */
constexpr uint32_t T_MOTOR_DIR = 2000; /* 2 s per direction */
constexpr uint32_t T_SERVO_TRAMO = 1000; /* 1 s per segment */
/* IPROPI parameters (set R to your actual resistor!) */
constexpr float VREF_V = 3.3f; /* VREF (V) */
constexpr float RIPROPI_OHMS = 23700.0f; /* Change to 10000.0f if you use 10 kΩ */
constexpr float AIPROPI_GAIN = 200e-6f; /* 200 µA/A (IPROPI gain) */
/* ADC configuration */
constexpr int ADC_BITS = 12; /* ADC resolution */
constexpr float ADC_VFULL = 3.3f; /* With 11 dB attenuation, ~3.3 V full scale */
/* Concurrent state machines */
enum class Phase { FWD, REV, DONE };
struct MotorSeq {
bool enabled=false; Phase phase=Phase::FWD; uint32_t tEnd=0;
void start() { enabled=true; phase=Phase::FWD; tEnd=millis()+T_MOTOR_DIR; }
};
struct ServoSeq {
bool enabled=false; int step=0; uint32_t tEnd=0;
void start() { enabled=true; step=0; servo.write(SERVO_RIGHT); tEnd=millis()+T_SERVO_TRAMO; }
};
MotorSeq seqA, seqB; ServoSeq seqS;
/* ADC counts -> volts */
float adcVolts(int pin) {
uint16_t raw = analogRead(pin);
return (raw * ADC_VFULL) / ((1 << ADC_BITS) - 1);
}
/* IPROPI volts -> motor current (A) */
float ipropiToCurrentA(float v_ipropi) {
return v_ipropi / (RIPROPI_OHMS * AIPROPI_GAIN);
}
/* Periodic sampling to Serial Plotter: IA, IB, and ITRIP */
void sampleAndPrintCurrents() {
float vA = adcVolts(PIN_AIPROPI);
float vB = adcVolts(PIN_BIPROPI);
float iA = ipropiToCurrentA(vA);
float iB = ipropiToCurrentA(vB);
float iTRIP = VREF_V / (RIPROPI_OHMS * AIPROPI_GAIN); /* Overcurrent trip threshold (A) */
/* Tab-separated columns for Arduino Serial Plotter */
Serial.print(iA, 4); Serial.print('\t');
Serial.print(iB, 4); Serial.print('\t');
Serial.println(iTRIP, 4);
}
/* Busy wait with periodic sampling (~every 20 ms) */
void waitWithSampling(uint32_t ms) {
uint32_t t0 = millis(), tNext = 0;
while ((uint32_t)(millis() - t0) < ms) {
uint32_t now = millis();
if ((int32_t)(now - tNext) >= 0) {
sampleAndPrintCurrents();
tNext = now + 20;
}
delay(1); /* Yield briefly */
}
}
/* Check /nFAULT low during a tagged section */
void checkFault(const char* tag) {
if (digitalRead(PIN_nFAULT) == LOW) {
Serial.print("[nFAULT] Fault detected during ");
Serial.println(tag);
}
}
void setup() {
Serial.begin(115200);
delay(100);
pinMode(PIN_AIN1, OUTPUT);
pinMode(PIN_AIN2, OUTPUT);
pinMode(PIN_BIN1, OUTPUT);
pinMode(PIN_BIN2, OUTPUT);
pinMode(PIN_nFAULT, INPUT_PULLUP);
motorA_coast();
motorB_coast();
/* ADC: 11 dB to cover up to ~3.3 V and 12-bit resolution */
analogReadResolution(ADC_BITS);
analogSetAttenuation(ADC_11db);
/* Optional header for Serial Plotter */
Serial.println("IA(A)\tIB(A)\tITRIP(A)");
/* Servo setup (50 Hz, constrained to given pulse widths) */
servo.setPeriodHertz(50);
servo.attach(PIN_SERVO, SERVO_MIN_US, SERVO_MAX_US);
servo.write(SERVO_CENTER);
/* 1) Motor A forward then reverse with sampling */
motorA_fwd(); waitWithSampling(T_MOTOR_DIR);
motorA_rev(); waitWithSampling(T_MOTOR_DIR);
motorA_brake(); delay(100); motorA_coast();
checkFault("Sequence 1 (Motor A)");
/* 2) Motor B forward then reverse with sampling */
motorB_fwd(); waitWithSampling(T_MOTOR_DIR);
motorB_rev(); waitWithSampling(T_MOTOR_DIR);
motorB_brake(); delay(100); motorB_coast();
checkFault("Sequence 2 (Motor B)");
/* 3) Servo sweep: +90°, -90° (1 s each segment) */
servo.write(SERVO_RIGHT); waitWithSampling(T_SERVO_TRAMO);
servo.write(SERVO_LEFT); waitWithSampling(T_SERVO_TRAMO);
servo.write(SERVO_CENTER);
/* 4) Concurrent sequences */
seqA.start(); seqB.start(); seqS.start();
}
void loop() {
/* Continuous sampling for the Plotter (~50 Hz) */
static uint32_t tNext = 0;
uint32_t now = millis();
if ((int32_t)(now - tNext) >= 0) {
sampleAndPrintCurrents();
tNext = now + 20;
}
/* Motor A concurrent sequence */
if (seqA.enabled) {
if (seqA.phase == Phase::FWD) {
motorA_fwd();
if ((int32_t)(now - seqA.tEnd) >= 0) {
seqA.phase = Phase::REV;
seqA.tEnd = now + T_MOTOR_DIR;
}
} else if (seqA.phase == Phase::REV) {
motorA_rev();
if ((int32_t)(now - seqA.tEnd) >= 0) {
seqA.phase = Phase::DONE; motorA_brake(); delay(50); motorA_coast();
}
}
}
/* Motor B concurrent sequence */
if (seqB.enabled) {
if (seqB.phase == Phase::FWD) {
motorB_fwd();
if ((int32_t)(now - seqB.tEnd) >= 0) {
seqB.phase = Phase::REV;
seqB.tEnd = now + T_MOTOR_DIR;
}
} else if (seqB.phase == Phase::REV) {
motorB_rev();
if ((int32_t)(now - seqB.tEnd) >= 0) {
seqB.phase = Phase::DONE; motorB_brake(); delay(50); motorB_coast();
}
}
}
/* Servo concurrent sequence (RIGHT -> LEFT -> CENTER) */
if (seqS.enabled) {
if (seqS.step == 0) {
if ((int32_t)(now - seqS.tEnd) >= 0) {
servo.write(SERVO_LEFT);
seqS.step = 1; seqS.tEnd = now + T_SERVO_TRAMO;
}
} else if (seqS.step == 1) {
if ((int32_t)(now - seqS.tEnd) >= 0) {
servo.write(SERVO_CENTER);
seqS.step = 2;
}
}
}
/* End condition: both motors done and servo centered */
if (seqA.phase == Phase::DONE && seqB.phase == Phase::DONE && seqS.step == 2) {
checkFault("Sequence 4 (concurrent)");
seqA.enabled = seqB.enabled = false; seqS.enabled = false;
motorA_coast(); motorB_coast();
while (true) { delay(1000); } /* Hold here after completion */
}
}