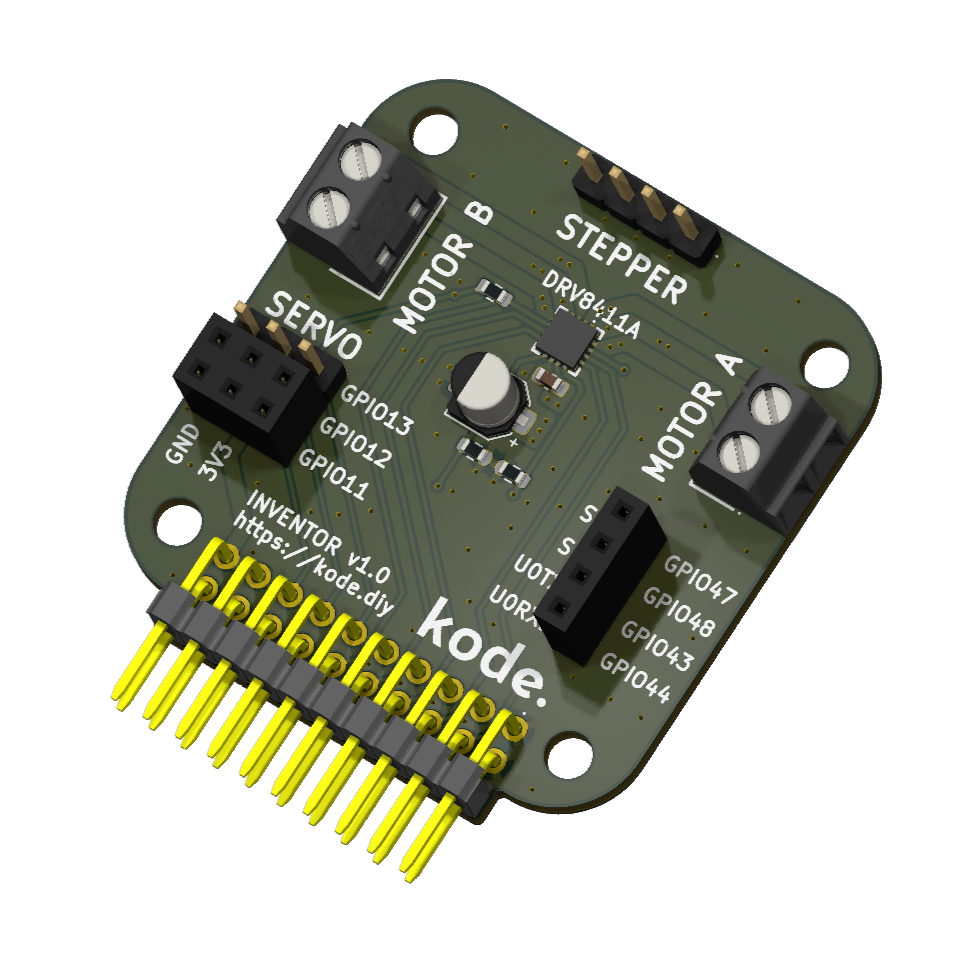
Características
Con este módulo puedes conectar motores a tu Kode Dot y hacer robots, como por ejemplo un coche siguelineas. Puedes conectar lo siguiente:- 2x motores DC o 1x motor paso a paso
- 1x servomotor
- 4x GPIOs para sensores
- 1x bus de I2C
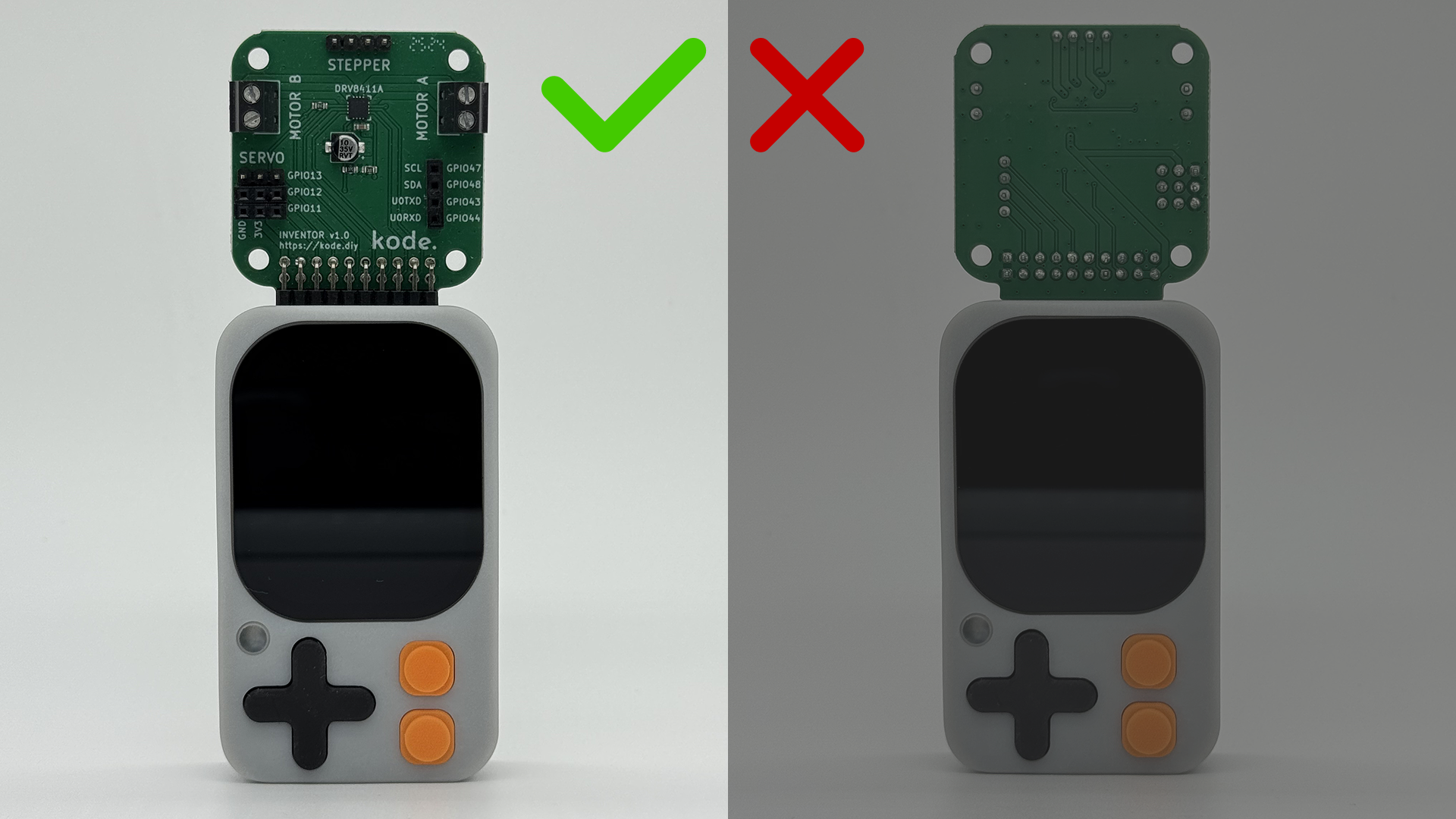
Conexión con el Kode Dot
Esquema de conexión
El driver que controla los motores está conectado de la siguiente manera:| Driver | ESP32-S3 |
|---|---|
| AIN1 | GPIO42 |
| AIN2 | GPIO41 |
| BIN1 | GPIO40 |
| BIN2 | GPIO39 |
| nFAULT | GPIO38 |
| AIPROPI | GPIO37 |
| BIPROPI | GPIO36 |
AIPROPI y BIPROPI sirven para medir la corriente que está consumiendo cada motor. Para más información consulta el datasheet del driver.
Ejemplo de código
Conecta dos motores DC a los conectores y con este código verás como primero aceleran, luego mantienen la velocidad máxima y finalmente desaceleran.motors_test.ino
/**
* DRV8411A + 2x DC + Servo + Lectura de corriente por IPROPI (ESP32-S3).
* Muestra en Serial Plotter: IA(A) \t IB(A) \t ITRIP(A) mientras ejecuta secuencias de ambos motores y un servo.
* Fórmulas IPROPI (datasheet): IPROPI(µA) = I_LS_total(A) * 200 µA/A; V_IPROPI = IPROPI * R_IPROPI;
* I_motor = V_IPROPI / (R_IPROPI * 200e-6); I_TRIP = VREF / (R_IPROPI * 200e-6).
*/
/* ───────── KODE | docs.kode.diy ───────── */
#include <Arduino.h>
#include <ESP32Servo.h>
/* Pines DRV8411A */
constexpr int PIN_AIN1 = 42;
constexpr int PIN_AIN2 = 41;
constexpr int PIN_BIN1 = 39;
constexpr int PIN_BIN2 = 40;
constexpr int PIN_nFAULT = 3;
/* IPROPI -> ADC (canal A y canal B) */
constexpr int PIN_AIPROPI = 2; /* Entrada ADC para A-IPROPI */
constexpr int PIN_BIPROPI = 1; /* Entrada ADC para B-IPROPI */
/* Servo */
constexpr int PIN_SERVO = 13;
Servo servo;
/* Configuración del servo (microsegundos y ángulos) */
constexpr int SERVO_MIN_US = 500;
constexpr int SERVO_MAX_US = 2500;
constexpr int SERVO_CENTER = 90;
constexpr int SERVO_LEFT = 0;
constexpr int SERVO_RIGHT = 180;
/* Funciones auxiliares DRV8411A */
inline void motorA_coast() { digitalWrite(PIN_AIN1, LOW); digitalWrite(PIN_AIN2, LOW); } /* Alta impedancia en ambas entradas */
inline void motorA_brake() { digitalWrite(PIN_AIN1, HIGH); digitalWrite(PIN_AIN2, HIGH); } /* Freno por decaimiento rápido */
inline void motorA_fwd() { digitalWrite(PIN_AIN1, HIGH); digitalWrite(PIN_AIN2, LOW); } /* Motor A adelante */
inline void motorA_rev() { digitalWrite(PIN_AIN1, LOW); digitalWrite(PIN_AIN2, HIGH); } /* Motor A atrás */
inline void motorB_coast() { digitalWrite(PIN_BIN1, LOW); digitalWrite(PIN_BIN2, LOW); } /* Alta impedancia en ambas entradas */
inline void motorB_brake() { digitalWrite(PIN_BIN1, HIGH); digitalWrite(PIN_BIN2, HIGH); } /* Freno por decaimiento rápido */
inline void motorB_fwd() { digitalWrite(PIN_BIN1, HIGH); digitalWrite(PIN_BIN2, LOW); } /* Motor B adelante */
inline void motorB_rev() { digitalWrite(PIN_BIN1, LOW); digitalWrite(PIN_BIN2, HIGH); } /* Motor B atrás */
/* Tiempos */
constexpr uint32_t T_MOTOR_DIR = 2000; /* 2 s por sentido */
constexpr uint32_t T_SERVO_TRAMO = 1000; /* 1 s por tramo */
/* Parámetros IPROPI (ajustar R al valor real usado) */
constexpr float VREF_V = 3.3f; /* VREF (V) */
constexpr float RIPROPI_OHMS = 23700.0f; /* Cambiar a 10000.0f si se usa 10 kΩ */
constexpr float AIPROPI_GAIN = 200e-6f; /* 200 µA/A (ganancia IPROPI) */
/* Configuración del ADC */
constexpr int ADC_BITS = 12; /* Resolución ADC */
constexpr float ADC_VFULL = 3.3f; /* Con atenuación 11 dB, ~3.3 V de escala completa */
/* Máquinas de estado concurrentes */
enum class Phase { FWD, REV, DONE };
struct MotorSeq {
bool enabled=false; Phase phase=Phase::FWD; uint32_t tEnd=0;
void start() { enabled=true; phase=Phase::FWD; tEnd=millis()+T_MOTOR_DIR; }
};
struct ServoSeq {
bool enabled=false; int step=0; uint32_t tEnd=0;
void start() { enabled=true; step=0; servo.write(SERVO_RIGHT); tEnd=millis()+T_SERVO_TRAMO; }
};
MotorSeq seqA, seqB; ServoSeq seqS;
/* ADC -> voltios */
float adcVolts(int pin) {
uint16_t raw = analogRead(pin);
return (raw * ADC_VFULL) / ((1 << ADC_BITS) - 1);
}
/* Voltios IPROPI -> corriente del motor (A) */
float ipropiToCurrentA(float v_ipropi) {
return v_ipropi / (RIPROPI_OHMS * AIPROPI_GAIN);
}
/* Muestreo periódico para Serial Plotter: IA, IB e ITRIP */
void sampleAndPrintCurrents() {
float vA = adcVolts(PIN_AIPROPI);
float vB = adcVolts(PIN_BIPROPI);
float iA = ipropiToCurrentA(vA);
float iB = ipropiToCurrentA(vB);
float iTRIP = VREF_V / (RIPROPI_OHMS * AIPROPI_GAIN); /* Umbral de sobrecorriente (A) */
/* Columnas separadas por tabuladores para Arduino Serial Plotter */
Serial.print(iA, 4); Serial.print('\t');
Serial.print(iB, 4); Serial.print('\t');
Serial.println(iTRIP, 4);
}
/* Espera activa con muestreo periódico (~cada 20 ms) */
void waitWithSampling(uint32_t ms) {
uint32_t t0 = millis(), tNext = 0;
while ((uint32_t)(millis() - t0) < ms) {
uint32_t now = millis();
if ((int32_t)(now - tNext) >= 0) {
sampleAndPrintCurrents();
tNext = now + 20;
}
delay(1); /* Breve espera para ceder CPU */
}
}
/* Verifica si /nFAULT está en bajo durante la sección indicada */
void checkFault(const char* tag) {
if (digitalRead(PIN_nFAULT) == LOW) {
Serial.print("[nFAULT] Falla detectada durante ");
Serial.println(tag);
}
}
void setup() {
Serial.begin(115200);
delay(100);
pinMode(PIN_AIN1, OUTPUT);
pinMode(PIN_AIN2, OUTPUT);
pinMode(PIN_BIN1, OUTPUT);
pinMode(PIN_BIN2, OUTPUT);
pinMode(PIN_nFAULT, INPUT_PULLUP);
motorA_coast();
motorB_coast();
/* ADC: 11 dB para abarcar hasta ~3.3 V y resolución de 12 bits */
analogReadResolution(ADC_BITS);
analogSetAttenuation(ADC_11db);
/* Cabecera opcional para Serial Plotter */
Serial.println("IA(A)\tIB(A)\tITRIP(A)");
/* Configuración del servo (50 Hz, limitado a los pulsos definidos) */
servo.setPeriodHertz(50);
servo.attach(PIN_SERVO, SERVO_MIN_US, SERVO_MAX_US);
servo.write(SERVO_CENTER);
/* 1) Motor A adelante y atrás con muestreo */
motorA_fwd(); waitWithSampling(T_MOTOR_DIR);
motorA_rev(); waitWithSampling(T_MOTOR_DIR);
motorA_brake(); delay(100); motorA_coast();
checkFault("Secuencia 1 (Motor A)");
/* 2) Motor B adelante y atrás con muestreo */
motorB_fwd(); waitWithSampling(T_MOTOR_DIR);
motorB_rev(); waitWithSampling(T_MOTOR_DIR);
motorB_brake(); delay(100); motorB_coast();
checkFault("Secuencia 2 (Motor B)");
/* 3) Barrido del servo: +90°, -90° (1 s cada tramo) */
servo.write(SERVO_RIGHT); waitWithSampling(T_SERVO_TRAMO);
servo.write(SERVO_LEFT); waitWithSampling(T_SERVO_TRAMO);
servo.write(SERVO_CENTER);
/* 4) Ejecución concurrente */
seqA.start(); seqB.start(); seqS.start();
}
void loop() {
/* Muestreo continuo para el Plotter (~50 Hz) */
static uint32_t tNext = 0;
uint32_t now = millis();
if ((int32_t)(now - tNext) >= 0) {
sampleAndPrintCurrents();
tNext = now + 20;
}
/* Secuencia concurrente Motor A */
if (seqA.enabled) {
if (seqA.phase == Phase::FWD) {
motorA_fwd();
if ((int32_t)(now - seqA.tEnd) >= 0) {
seqA.phase = Phase::REV;
seqA.tEnd = now + T_MOTOR_DIR;
}
} else if (seqA.phase == Phase::REV) {
motorA_rev();
if ((int32_t)(now - seqA.tEnd) >= 0) {
seqA.phase = Phase::DONE; motorA_brake(); delay(50); motorA_coast();
}
}
}
/* Secuencia concurrente Motor B */
if (seqB.enabled) {
if (seqB.phase == Phase::FWD) {
motorB_fwd();
if ((int32_t)(now - seqB.tEnd) >= 0) {
seqB.phase = Phase::REV;
seqB.tEnd = now + T_MOTOR_DIR;
}
} else if (seqB.phase == Phase::REV) {
motorB_rev();
if ((int32_t)(now - seqB.tEnd) >= 0) {
seqB.phase = Phase::DONE; motorB_brake(); delay(50); motorB_coast();
}
}
}
/* Secuencia concurrente Servo (DERECHA -> IZQUIERDA -> CENTRO) */
if (seqS.enabled) {
if (seqS.step == 0) {
if ((int32_t)(now - seqS.tEnd) >= 0) {
servo.write(SERVO_LEFT);
seqS.step = 1; seqS.tEnd = now + T_SERVO_TRAMO;
}
} else if (seqS.step == 1) {
if ((int32_t)(now - seqS.tEnd) >= 0) {
servo.write(SERVO_CENTER);
seqS.step = 2;
}
}
}
/* Condición de fin: ambos motores terminados y servo centrado */
if (seqA.phase == Phase::DONE && seqB.phase == Phase::DONE && seqS.step == 2) {
checkFault("Secuencia 4 (concurrente)");
seqA.enabled = seqB.enabled = false; seqS.enabled = false;
motorA_coast(); motorB_coast();
while (true) { delay(1000); } /* Mantener aquí tras finalizar */
}
}